|
مهندسی مکانیک سکاندار علوم مهندسی

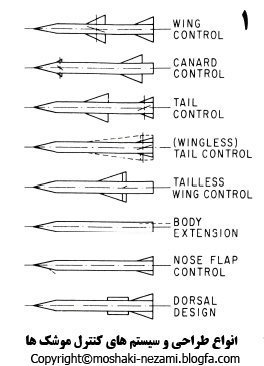
تصویری از انواع پیکربندی ایرودینامیکی چهر گروه از موشک ها:
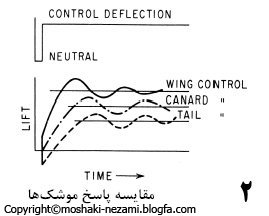
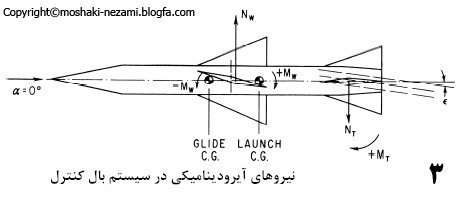
1)کنترل با بال(Wing Control ) این نوع پیکربندی ,مرکب از سطحی نسبتا بزرگ است که در فاصله کمی از مرکز ثقل موشک قرار می گیرد.در این نوع پیکربندی نیاز به یک مجموعه متعادل کننده در قسمت های انتهای بدنه موشک داریم. این نوع سیستم کنترل معمولا در موشک های(AAM ) بکار گرفته می شود زیرا خصوصیات پاسخ سریع از لحاظ کنترل را دارد.بطوری که در شکل زیر نشان داده شده است نیروی برآ(Lift ) در اثر تغییر در اثر زاویه کنترل فورا تغییر می نماید و باعث مانور موشک می شود.برای اضافی در اثر تغییر زاویه خم بوجود می اید.کنترل موثر بالها(گشتاور Pitching و یا Turning در اثر تغییر مکان سطوح کنترل) عموما خیلی کم است.بنابر این حرکت مکانی نیروی برآ در محدوده بسته ای از مرکز ثقل انجام می گیرد ,به همین علت یک نیروی رو به پایین در قسمت دم در اثر دانواش بال بوجود می آید که از لحاظ گشتاور(Turning ) برای ایجاد برآی اضافی مطلوبست.سودمندی این دانواش بر روی سطوح کنترل در شکل زیر نشان داده شده است.
محل نصب بال در طراحی موشک نوع بال کنترل ,بسیار بحرانی است,بویژه در حالتی که محدوده تغییر مکان مرکز ثقل در حالت پرتاب و در اخرین لحظات روشن بودن موتور Burn-out زیاد باشد این حالت رخ می دهد از این رو سطوح بال عموما در محدوده بسیار نزدیکی از مرکز ثقل حالت پرتاب قرار می دهند و این به علت ایجاد تعادل استاتیکی مطلوب با داشتن ابعاد کوچک مجموعه دم است.تاثیر حرکت مرکز ثقل به طرف جلو,کاهش تاثیر سطوح کنترلی و در نتیجه مانور پذیری بر حسب کج شدن بال است بطوریکه در شکل زیر ملاحظه می کنید.
به دلیل افزایش برآ در اثر تغییر وضعیت بال نیاز به زاویه حمله کمتر تعادل و همچنین ضریب باری (Load Factor) کمتر نسبت به طراحی نوع دم کنترل دارد.این مقدار کم زاویه حمله تعادل(Trim Angle of Attack),مزیت ویژه ای از نظز طراحی ورودی هوای موتورهای تنفسی و سیستم های هدایت جستجوگر دارد,همچنین به دلیل بزرگی بال,گشتاورد لولای(Hinge Moment) زیادی تولید می شود. از این رو برای انتخاب و نصب خط لولا,آنالیز بهینه دقیقی باید انجام داد تا در کل محدوده اعداد ماخ پروزای,توان کمکی حداقل نیاز داشته باشیم.برای ایجاد کنترل عرضی بوسیله ترکیبی از حرکات جزئی بال در جهت(Pitch) و (Yaw) امکان پذیر می گردد به همین علت نیاز به سیستم کنترل وجود دارد که قبل از بکار بردن این نوع سیستم ها باید بطور دقیق مورد ملاحظه قرار گیرند و از جمله آنها میتوان به موارد زیر اشاره کرد: 1-افت شدید بهره کنترل دم در اثر قرار گرفتن در دانواش برای شرکت درتعادل استاتیکی 2-نتایج غیر خطی آیرودینامیکی دانواش در اثر تغییر وضعیت بال و زاویه حمله) 3-در اثر ترکیب شدن اثرات زاویه حمله و تغییر وضعیت بلا گشتاوردهای(Rolling) مخالفی در سطوح دم ایجاد می گردد.
2-سیستم کنترل کاناردی(Canard Control)
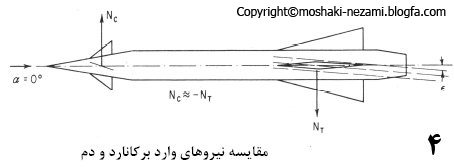
پیکربندی کانارد شامل سطوح کوچکی هستند که درست در قسمت جلوی بدنه موشک قرار می گیرند و سطوح دیگر نظیر بال یا دم به ترتیب در قسمت میانی و انتهای بدنه نصب می شوند.
به دلیل کوچکی اندازه سطوح کانارد در مقایسه با پیکربندی معمولی(بال),دانواش قابل توجهی ایجاد نمی کند بنابر این در مشخصات تعادل طولی اثرات مخالفی ایجاد نمی نماید. بدین ترتیب حاشیه پایداری استاتیکی بزرگی با تغییر مکان بال به راحتی حاصل می آید.کل نیروی برآ در این نوع پیکربندی در اثر زاویه حمله بوجود می آید زیرا برآیی که کانارد تولید می نماید باعث ایجاد یک نیروی بطرف پایین در بال می گردد.این موضوع در شکل بالا مشخص شده است. موضوع بسیار جالبی که در پیکربندی کانارد مطرح است سادگی ذاتی آنست,بعلاوه تغییر در ماکن مرکز ثقل در اثر تغییر طراحی ممکن است که بسادگی قابل تطبیق با مکان جدید بال باشد همچنین به دلیل کوچکی ابعاد سطوح تولید برآ,پسای کلی و وزن موشک نیز کم است.بعضی از معایب اصلی پیکربندی کانارد عبارتند از: 1-ایجاد تعادل در زوان مشکل است چون کانارد ابعادشان کوچک است و اثر دانواش کمی بر بال دارند در نتیجه روش پیچیده ای برای کنترل رول مورد نیاز است(نظیر استفاده از کنترلها در قسمت نوک بال). 2-بطور نسبی احتیاج به میزان سرعت سطوح کنترلی بالایی دارد تا نرخ پاسخ مطلوبی را بدهد چونکه برآی مورد نیاز در اثر زاویه حمله ایجاد می گردد,همان طور که در شکل شماره 2 می بیند.نرخ بالای سرعت مورد نیاز سطوح کنترلی,افزایش در قدرت سرورها را طلب می کند اگر چه این قدرت مورد بحث در مقایسه با سرورهایی که در سیستم بال کنترل بکار میروند قدرت کمتری دارد از این رو برای موشک های نسبتا کوچک که نیاز به تثبیت در رول وجود ندارد,پیکربندی کانارد شاید بهترین پیکربندی باشد. ادامه دارد... منبع: مهندسی مکانیک موضوع مطلب : درباره سایت  آخرین مطالب
آرشیو وبلاگ پیوندها
سکانداران وبلاگ
آمار وبلاگ
فرم تماس امکانات دیگر |
|
کلیه حقوق این وبلاگ برای مهندسی مکانیک سکاندار علوم مهندسی محفوظ است
|